




Обратный звонок
Спасибо! Форма отправлена
Спасибо! Форма отправлена

Создание роботов для лесовосстановительных работ
+7 (495) 108-24-90
Контакты
Адрес офиса:
г. Москва, тер. Инновационного Центра Сколково, бульвар Большой, д. 42, стр. 1
Построение маршрута
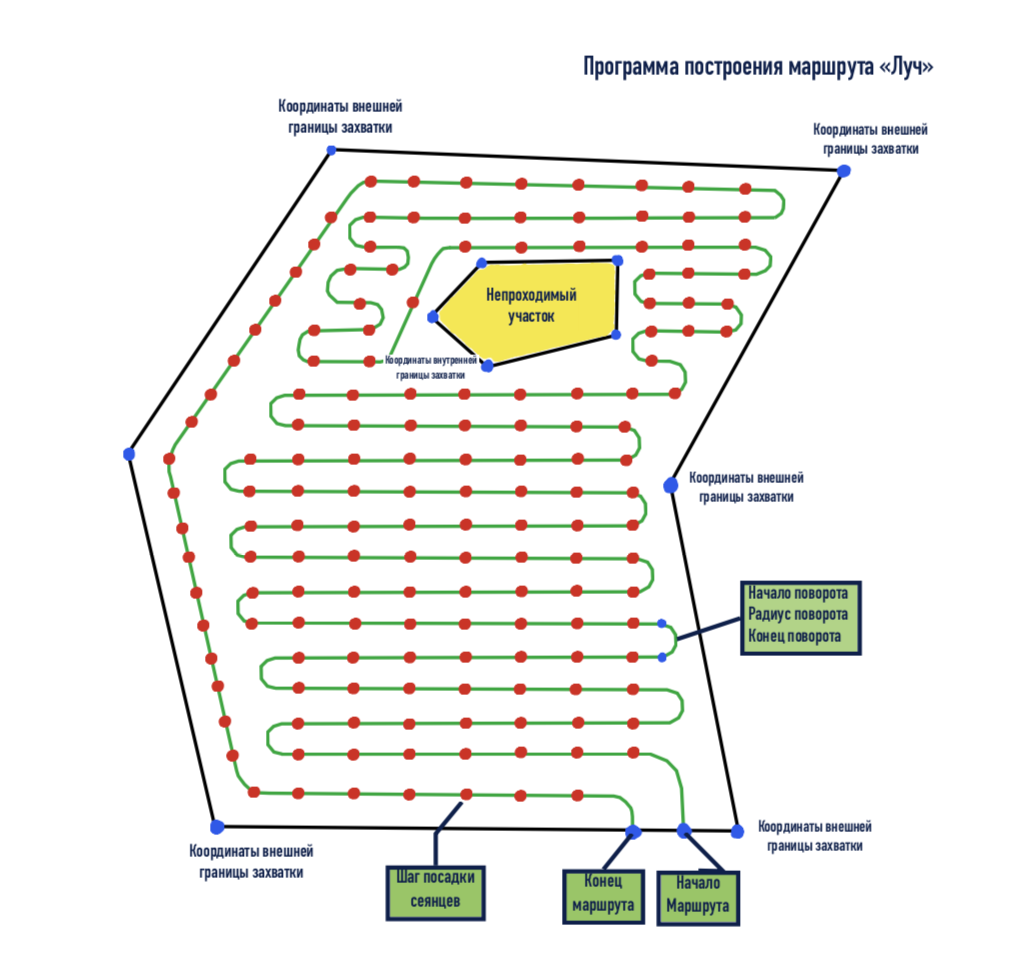
Программа построения маршрута движения мобильного робота в неизвестных средах
С целью реализации возможности робота Святобор автономно перемещаться по захватке, ограниченной координатами, разработан программный комплекс расчета пути для мобильного робота лесовосстановительного комплекса «Святобор».
Исходные данные:
1. Координаты внешней границы захватки, предназначенной для лесовосстановительных работ
2. Координаты исключаемых из работы участков (водоемы, непроходимые участки, крупные буреломы, сгруппированные лесосечные отходы и прочее)
3. Координаты начала и окончания маршрута
4. Нормативное количество сеянцев на гектар
5. Минимальное расстояние между сеянцами
Задача программы:
Вычисление оптимального маршрута движения робота с целью равномерного распределения сеянцев на заданном участке.
Результат вычисления программы:
Последовательность координат для движения робота, радиусы и вершины углов поворота.

Программа построения маршрута движения мобильного робота в неизвестных средах
Для получения дистрибутива программы и условий приобретения необходимо связаться с правообладателем по ссылке https://t.me/roboforestTeam
450 000 р.


Реквизиты организации:
ООО "ЛесоВосстановительная Робототехника"
Вид деятельности:
Деятельность по управлению компьютерным оборудованием (ОКВЭД 62.03)
Юридический адрес:
Юридический адрес:
121205, г. Москва, вн. тер. г. муниципальный округ Можайский, тер. Инновационного Центра Сколково, бульвар Большой, д. 42, стр. 1
ИНН 7814811498 КПП 773101001
ОГРН 1227800098030
ОКПО 74175488
ИНН 7814811498 КПП 773101001
ОГРН 1227800098030
ОКПО 74175488
Банковские реквизиты:
1) Расчетный счет: 40702810326280000474
1) Расчетный счет: 40702810326280000474
БИК: 044525411
ФИЛИАЛ "ЦЕНТРАЛЬНЫЙ" БАНКА ВТБ (ПАО)
Корреспондентский счет: 30101810145250000411
2) Расчетный счет: 40702810610001400587
БИК: 044525974
АО «ТИНЬКОФФ БАНК»
Корреспондентский счет: 30101810145250000974
БИК: 044525974
АО «ТИНЬКОФФ БАНК»
Корреспондентский счет: 30101810145250000974
Генеральный директор Хахаев Руслан Анатольевич
Главный бухгалтер Хахаев Руслан Анатольевич
Контакты
Адрес офиса:
г. Москва, тер. Инновационного Центра Сколково, бульвар Большой, д. 42, стр. 1
E-mail:
info@roboforest.org
Услуги
Спасибо! Форма отправлена
Мегагрупп.ру